超维计算让AI有记忆和反应,还能解决自动驾驶难题
马里兰大学的一个研究团队最近提出了超维计算理论(hyperdimensional computing theory),能够让机器人拥有记忆和反应。这可以打破我们与自动驾驶汽车和其他机器人之间的僵局,这也将促使更像人类AI模型的出现。
马里兰州团队提出了一种理论方法——超维计算,一种超线程的替代方式,基于布尔值和数字计算,可以取代当前用于处理感官信息的深度学习方法。
根据团队成员之一也是论文作者的博士生Anton Mitrokhin的说法,这很重要,因为要让AI像人类一样面临着处理的瓶颈:
基于神经网络的AI方法既庞大又缓慢,因为这种方法无法记忆。我们的超维理论方法可以产生记忆,这将大幅减少计算需求,并且使任务可以更快和更有效地完成。
记忆是当前人工智能所不具备的,但这对于预测未来的任务非常重要。想象一下,在打网球的时候,每次击球时你都不在头脑中计算,而只是跑过来,然后打它。你感知到球并采取行动,没有借助其他东西将真实世界的数据转化为数字数据然后进行处理。这种在没有过滤器的情况下将感知转化为行动的能力是人类在现实世界中固有的能力。
2016年5月,特斯拉汽车在开启自动驾驶辅助系统的情况下,未能“看到”卡车的白色拖车,特斯拉汽车以高速公路的速度撞向它。最近又发生了同样的事情。不同型号特斯拉汽车,不同版本的自动驾驶系统,但结果是同样的,这是为什么?
虽然埃隆马斯克应该承担一些责任,人为错误也需要对此负责,但事实仍然是深度学习会让自动驾驶汽车变得糟糕,并且没有太大的希望让它会变得更好。
其原因很复杂,但可以很容易地解释。AI不知道汽车、人、拖车或热狗的样子。很容易发现,一个深学习型AI模型可以通过一百万张的图片进行训练让这个模型对热狗图片识别的精确度达到99.9%,但它永远不会知道真正看起来像是什么样。
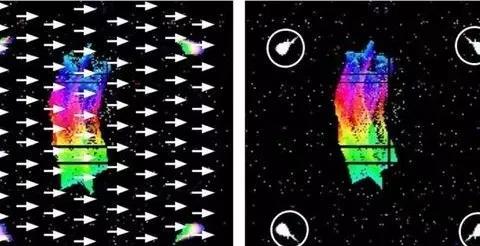
超维计算理论为AI提供了真正“看到”世界并做出自己推论的能力。通过对每个可感知的对象和变量进行数学运算,超矢量可以在机器人中实现“主动感知”,而不是试图通过强制处理整个宇宙。
据论文的主要作者 Yiannis Aloimonos所说:
主动感知者知道为什么要感知,然后选择要感知的内容,并确定感知的方式,包括何时以及在何处实现感知。它选择并专注于场景、时刻和情节。然后,它将其机制,传感器和其他组件,以根据它想要查看的内容进行操作,并选择最佳捕获其意图的视点。我们的超维框架可以解决每个问题。
虽然机器人的超维计算操作系统的创建和实现仍然是理论上的,但这些想法为研究提供了一条前进的道路,可以为无人驾驶汽车AI提供解决当前需要解决问题的方法。
此外,这个理论不仅仅是机器人技术。研究人员的最终目标是用更快、更有效的基于超维计算的替换神经网络模型取代迭代神经网络模型。这可能会导致一种没有进展的线下,它接近于开发新的机器学习模型。
我们可能更接近于实现一个能够在不熟悉的环境中学习执行新任务的机器人 - 比如“Jetsons”中的Rosie The Robot - 比大多数专家都认为的更好。当然,像这样的技术也可能带来其他问题......不那么卡通化的产品。
雷锋网编译,via thenextweb
来源 | 雷锋网